UART¶
UART Overview¶
UART Overview - VAR-SOM-MX93¶
The VAR-SOM-MX93 and DART-MX93 expose up to seven LPUART interfaces, some of which are multiplexed with other peripherals.
| Serial Port | Device Node | Device Tree | VAR-SOM-MX93 / Symphony Board | DART-MX93 / DT8MCustomBoard |
|---|---|---|---|---|
| UART0 | /dev/ttyLP0 | lpuart1 | Symphony board serial console | DT8MCustomboard serial console |
| UART2 | /dev/ttyLP2 | lpuart3 | Disabled by default, see datasheet | Disabled by default, see datasheet |
| UART3 | /dev/ttyLP3 | lpuart4 | Disabled by default, see datasheet | Disabled by default, see datasheet |
| UART4 | /dev/ttyLP4 | lpuart5 | 1.8V Signal level, used on SOM for Bluetooth interface and can be accessible only if Bluetooth is disabled. [1] | 1.8V Signal level, used on SOM for Bluetooth interface and can be accessible only if Bluetooth is disabled. [1] |
| UART5 | /dev/ttyLP5 | lpuart6 | Connected to Symphony board J18.7 and J18.9 | Connected to DT8MCustomboard J12.4 and J12.6 |
| UART6 | /dev/ttyLP6 | lpuart7 | Connected to Symphony board J18.3 and J18.5 | Connected to DT8MCustomboard J12.11 and J12.13 |
| UART7 | /dev/ttyLP7 | lpuart8 | Disabled by default, see datasheet | Disabled by default, see datasheet |
Disabling Bluetooth / Enabling UART4 (/dev/ttyLP4)¶
UART4/ttyLP4 is used by the Bluetooth on the SOM. To use it on the carrier, Bluetooth must be disabled on the SOM.
First, disable variscite-bt by running:
# systemctl stop variscite-bt; systemctl stop variscite-ot
# systemctl disable variscite-bt; systemctl disable variscite-ot
Then, disable bluetooth in the device tree imx93-var-som.dtsi:
Testing UART5¶
The following demonstrates how to test UART5 on the VAR-SOM-MX93 Symphony board. The same process applies to the DT8MCustomboard following the table above.
Short J18.7 and J18.9 pins and run the following commands:
For each invocation of echo command the "hello" string should appear on the terminal.
Testing UART6¶
The following demonstrates how to test UART6 on the VAR-SOM-MX93 / Symphony board. The same process applies to the DT8MCustomboard following the table above.
Short J18.3 and J18.5 pins and run the following commands:
For each invocation of echo command the "hello" string should appear on the terminal.
Disabling UART5¶
To disable UART5 edit arch/arm64/boot/dts/freescale/imx93-var-som-symphony.dts or arch/arm64/boot/dts/freescale/imx93-var-dart-dt8mcustomboard.dts under kernel source directory and modify
to
Other UARTs can be disabled in a similar manner by referencing the table above.
Configuring RS485 Half-Duplex¶
The i.MX93 supports controlling an rs485 transceiver driver enable using RTS_B. For more details, please refer to 63.3.4.4 Transceiver driver enable using RTS_B of the i.MX 93 Applications Processor Reference Manual.
RS485 is enabled in software by:
- Enabling the RTS pin in the device tree.
- Enabling RS485 in the serial driver.
The example below demonstrates how to do this on the VAR-SOM-MX93 using /dev/ttyLP6 on J18.3 (TX), J18.4 (RX) and J17.8 (RTS).
First, disable the ov5640_mipi0 which uses the RTS pin:
Then, configure the RTS pinmux in pinctrl_uart7:
After booting the updated device tree, use the following python script to test RS485:
import sys
import serial
import serial.rs485
import time
def configure_rs485(port, data):
try:
# Open the serial port
ser = serial.Serial(port, baudrate=9600)
# Configure RS485
ser.rs485_mode = serial.rs485.RS485Settings(
delay_before_tx=0,
delay_before_rx=0,
rts_level_for_tx=False, # RTS is low during transmission
rts_level_for_rx=True, # RTS is high during reception
loopback=False
)
# Write data to the port three times with a delay of 10ms between each
for _ in range(3):
ser.write(data.encode())
time.sleep(0.01) # 10ms delay
# Close the serial port
ser.close()
print("Data sent successfully.")
except Exception as e:
print(f"Error: {str(e)}")
if __name__ == "__main__":
if len(sys.argv) != 3:
print("Usage: python3 rs485.py <port> <data>")
else:
port = sys.argv[1]
data = sys.argv[2]
configure_rs485(port, data)
Finally, install pyserial and run the script:
root@imx93-var-som:~# pip3 install pyserial
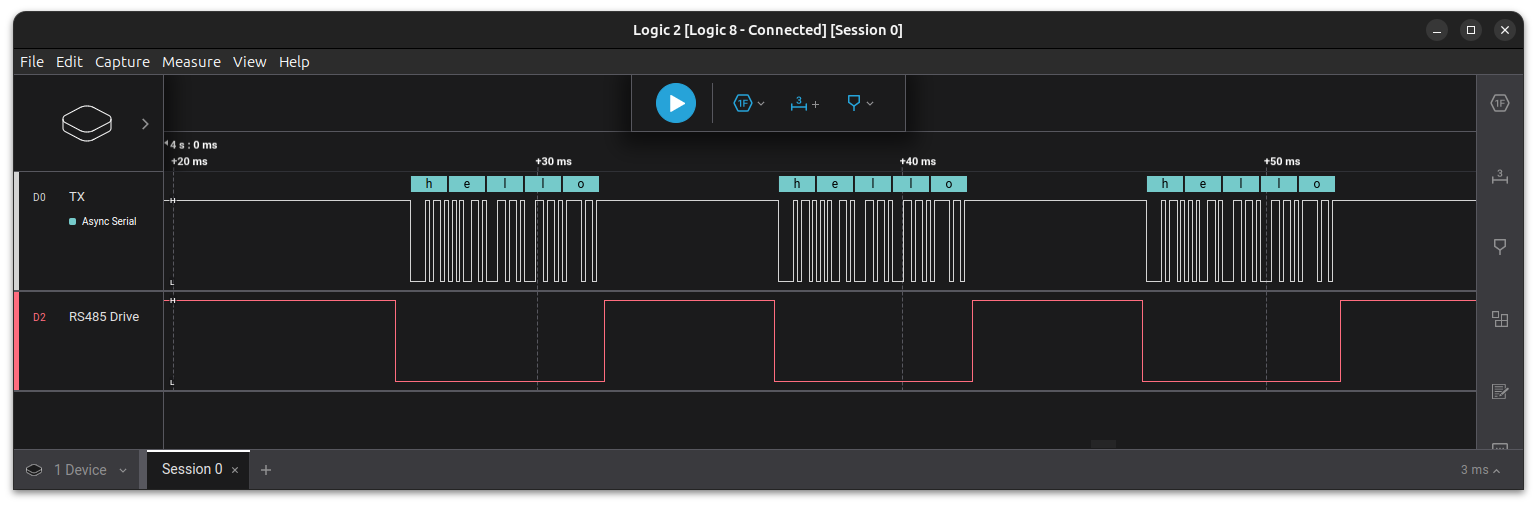
root@imx93-var-som:~# python3 rs485.py /dev/ttyLP6 "hello"
The following image was captured on a logic analyzer using this example: